I'm a senior CS student at MIT. I love robotics, coding and machine learning. I'm, currently working on DART , a teleoperation software for imitation learning, under Younghyo Park and Prof. Pulkit Agrawal at the Improbable AI Lab.
Projects

Open-source guide for low-cost dextrous hand that can be teleoperated for imitation learning.
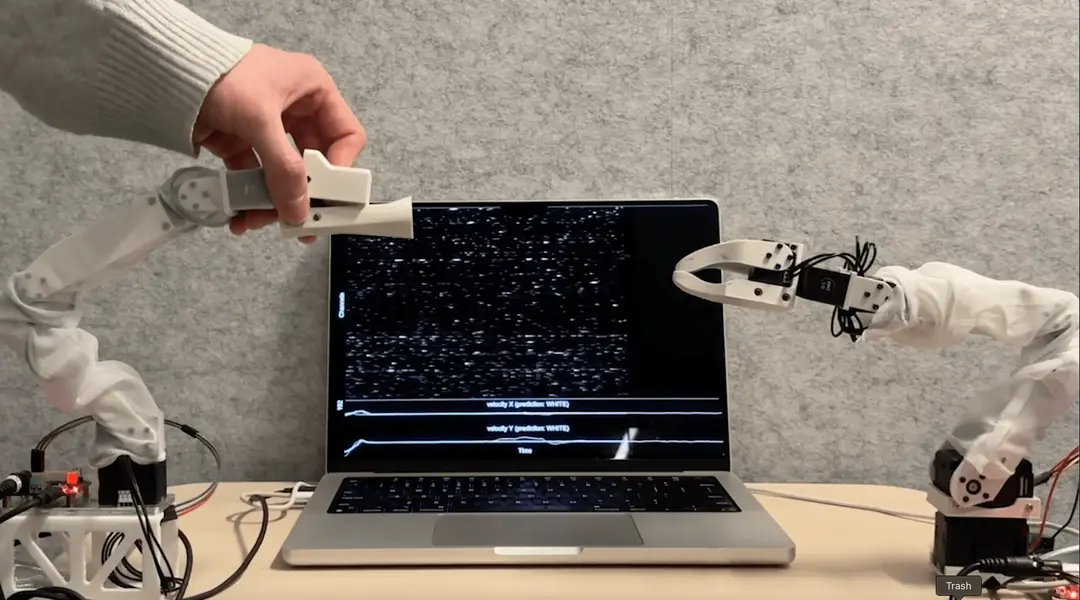
Using monkey brain data to teleoperate robots & generating brain data from robot movement.

Working on Apple Vision Pro App for collecting data for robot imitation learning.
Blog
Recreating a $200K setup for $2K
Real-time teleoperation of dual Shadow Hands setup ($200K hardware value) running in our DART teleoperation platform on Apple Vision Pro
Our failed bet on simulation data
We tried to collect data for imitation learning in simulation and failed. Here is why.
How to collect internet-scale amount of data for robotic learning
Doing imitation learning with physical setup is not it. Only robotics learning in simulation can scale.